The prevention of turbine overspeed is an important function of regulating the security system, especially in the case of load rejection and other adverse conditions, requiring the adjustment of the valve can be closed as soon as possible to control the turbine speed to prevent the unit from tripping, and the speed is controlled at the synchronous speed, if the power grid is short When it fails, you can quickly pick up the load.
With the continuous increase of stand-alone capacity, the gap between the steam power and rotor inertia is increasing. Practice shows that it is difficult to satisfy the need for the rotor to fly without tripping because the speed feedback of the control system quickly closes the valve. The request. As a result, an over speed limit control device (OPC) was introduced. At the moment of the oil switch tripping, the regulating valve is immediately closed by electric overspeed. After a certain delay, the regulating door is restored and controlled by the regulating system. Therefore, the load rejection characteristics of the unit is actually the result of the joint action of the control system and the overspeed limit control device. The overspeed limit plays a crucial role in the overspeed protection of the large unit.
Zhuhai Power Plant has two 700 MW units in the first phase. The steam turbine is TC4F-40 type intermediate reheater and three-cylinder four-convection condensing type. The rated power is 700MW and the maximum power is 730MW. The boiler is a radiating and reheating forced circulation boiler, steam flow (BMCR) is 2290t/h, both manufactured by MITSUBISHI Heavy Industry Co., Ltd.; the generator is the Westinghouse company's product, rated power 746MW, MVA capacity 828.889, power factor 0.9, terminal voltage 22kV. The four-stage load rejection test shows that the speed-flying characteristics of the unit after load rejection are good, which is closely related to the design of the OPC loop.
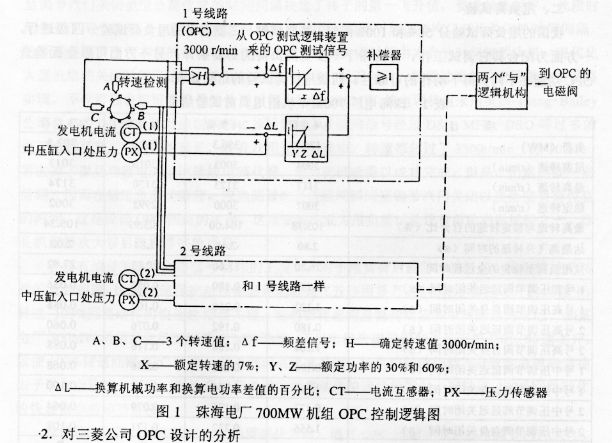
First, speed limit control loop analysis Design of Mitsubishi OPC The OPC circuit designed by Mitsubishi is shown in Figure 1.
Two sets of devices are used in the entire OPC loop. The redundant design is the same, through the AND gate to the OPC solenoid valve to enhance the reliability of the system. The trigger signal of OPC is designed as the synthesis of two signals, one is the frequency difference signal 厶f, it represents the difference Δn between the measured speed n of the turbine and the standard synchronous speed 3000r/min, and it is input into a function generator. The number NUml between 0 and 1 is generated between 0 and 7%, ie between 0 and 210 r/min; the other is the unbalanced quantity signal ΔMW for mechanical and electrical loads. Specifically, the generator current signal I representing the generator power is converted into the percentage of the electric load MWl and the rated load; the ICV valve outlet steam pressure signal Pl representing the mechanical power of the turbine is converted into a percentage of the mechanical load MW2 and the rated load; The user subtracts △MW and enters it into a function generator. When ΔMW<30%, the output signal Num2=0: when 30%<ΔMW<60%, the output signal Num2 is a number between 0 and 1; when ΔMW>60%, the output signal Num2=1 . The power imbalance AMW is designed to compensate for the speed signal. The two signals pass through the compensator and Num=Numl+Num2 is obtained. When Num>1, the OPC operates until the signal of the OPC action disappears.
2. The analysis of Mitsubishi OPC design can be seen from the analysis of Figure 1 and the above. Under different operating conditions, the OPC function suppresses the speed (power) differently. (1) The power compensation when the overspeed turbine is running under no-load conditions Since the loop is always less than 30%, the Num2 output is zero. The OPC only operates when the unit speed exceeds 107% of the rated speed.
(2) Load rejection during 25% load operation Since ΔMW is still less than 30%, the OPC solenoid valve does not operate after the oil switch trips. At this time, the PID valve is closed by adjusting the system's negative feedback. With 25% load rejection, due to the fact that the steam torque does not accelerate the rotor very quickly, the control system has the ability to suppress the speed below 107% of the rated speed. Even if it exceeds 107%, the OPC speed circuit also operates to control the speed in critical condition. Breaker operating speed below.
(3) Load rejection during 50% load operation Since ΔMW is between 30% and 60%, power compensation Num2 between load and load is about 0.66 during load rejection, so when the speed is increased to 3063 r/min, The OPC action quickly closes the regulating valve and suppresses the soaring of the speed.
(4) Load rejection due to 75% and 100% load operation. AMW is greater than 60%. When the load is dumped, the power compensation NUml is immediately set to 1, and the OPC moves to quickly close the regulating valve to suppress the soaring of the speed.
(5) Power imbalance during 60% load operation Even if the oil switch does not trip (speed does not fly up), there is also an imbalance between the generator active power and the turbine mechanical power, power compensation Num2 set 1, OPC solenoid valve action, adjustment Valve fast off.
Second, load rejection test China's load rejection test is divided into 50% and 100% two levels. According to the convention, Mitsubishi's load rejection test is divided into four levels. On the one hand, in order to cooperate with other debugging work, it is necessary for the higher load with the next step. On the other hand, the reliability of the OPC function under different loads can be fully checked. The results of the four-stage load rejection test are shown in Table 1.

From Table 1, it can be seen that when the load is dumped at 175.4 MW, the power balance compensation circuit does not work, and the trigger of the OPC circuit is only generated by the frequency difference signal when the rotation speed exceeds 107%. The regulation system itself can control the flying speed to 107% or less (103.78%), and the adjustment quality of the regulating system is good. The high pressure regulating valve No. 1 starts to close after a delay of 0.198s and the closing time is 1.122s. When load rejection is 350.3MW, the power balance compensation loop is involved. OPC operates after the speed increases by a certain value. No. 1 high pressure control valve starts to close after a delay of 0.180s. The closing time is only 0.280s. When the load is dumped at 532.0MW and 702.8MW, the power balance compensation loop is involved. Under the action of the power balance compensation loop, the OPC immediately moves, and the No. 1 high pressure control valve starts to close with a delay of about 0.1 s. The closing time is only 0.068s. . Although the high-load rejection, the steam torque is several times lower than the low load, the rotor's moment of inertia does not change, but under the control of the OPC loop, the speed can be controlled within the ideal flying value. The 4th-time load-rejection rotor-flying curve has only one highest flying speed, which is stable at around 3000r/min synchronous speed after about 25s, indicating that the unit has good characteristics of preventing the speed-up of the load-rejecting operation and the idling after the decoupling.
Third, overspeed limit control loop analysis of the basic requirements 1. The rapidity of the OPC action proves that the overspeed limit loop OPC has a significant effect in suppressing the dynamic rise of the rotational speed after load rejection. In the design of the unit that requires the valve to have a quick-off function, it is generally required to immediately act after the oil switch trips, and temporarily close the regulating valve. The effect of the ancient system on preventing the first flying speed after load rejection is mainly achieved through OPC. Therefore, the time interval from the moment the oil switch trips to the time the damper is closed to the idle load position determines the first flying value of the rotor. The faster the better, the better. This period of time includes two parts. One is the delay time T of the loop, that is, the time interval from the time the oil switch trips to the adjustment valve starts to close, and the other is to adjust the closing time T of the valve itself:. The closing time of the valve itself is determined by its own time constant. The closing time of modern large-scale units has reached an ideal level; the delay time is generally achieved through a simple intermediate relay circuit, which not only ensures reliability but also shortens the signal transmission time. For example, a 300MW pure electric tune unit adopts the INFI-90 distributed control system produced by Elsag-Bailey of the United States. The original design oil switch trip signal passed through excessive electronic circuit links such as DSI, MFP, DSO, etc., resulting in extended delay, several times. In the load rejection test, the rotation speed exceeded 3300 r/min (over 10%); after removing the microprocessor circuit and replacing it with a hard-wired circuit, the load rejection test was successfully completed. However, there are still some problems. Therefore, before doing the load rejection test, the time from the moment the oil switch trips to the adjustment of the valve closing and to the empty load position should be measured. This is the key to the design of the OPC circuit. This test should be a rejection load. One of the mandatory tests before the test is also a recommended test item after each unit overhaul.
In the condition that there is no oil switch tripping circuit signal action, for the accidental overspeed after the load rejection to prevent the second overshoot and the unit maintains idling, 103% overspeed protection has a significant effect on the continued soaring of control speed. However, in the process of rapid flight of the rotor, the rapidity of the speed of the 103% loop is quite critical. It includes the response of the speed measurement mechanism and the delay of the intermediate circuit. If a power plant 300MW generator demagnetization switch MK trips, and the generator loss of magnetic protection and out of step protection is not moving, the speed is soaring, resulting in 103% speed loop OPC action, although the regulation valve quickly shuts down, but the unit speed is still flying up The critical blocker hits the sub-action and shuts down. Therefore, while checking the rapidity of the tripping circuit of the oil switch, the speed of the 103% loop operation should also be given considerable attention.
For units that are designed to have fast valve closing, when a quick shutoff is required, the adjustment valve should be closed quickly via the OPC circuit.
2. After the OPC reset time OPC action, it is forced to seize control of the unit speed, but the final speed of the stability control should still be completed by the regulation system. For automatic regulated power units with 3000 r/min operation after load rejection, the OPC action can be reset immediately; however, for the adjustment system that has not cut off the given value after load rejection, there is a proper reset time, otherwise the actual speed The difference between the speed and the given speed may lead to a second soaring. Practice shows that the second soaring can not be ignored, and its damage is even more than one soaring. According to some literatures, simulation studies have shown that - the maintenance time is too long and too short are not suitable, and the required time is not less than the closing time of the oil motive. For example, the units in the East Plant generally require a reset time of about 2 ± 0.5s. The second soaring is also closely related to the operation mode of the bypass and the load rejection of the unit. Practice has shown that, for the unit with severe secondary fly-out, the 103% speed loop plays an important role in suppressing the second soaring.
IV. Concluding remarks The results of the four-stage load rejection test show that the OPC circuit design and pure electric control system of the Zhuhai Power Plant 700 MW unit introduce a power compensation circuit, which not only has a fast shutdown function, but also has good adaptability to load rejection conditions under different loads. Although there are many intermediate electronic links in the OPC circuit, the control of the rotational speed has achieved very good results. This shows the performance of various components (including speed, power, pressure measurement, comparison, function generation, compensation, etc.). superior. The design of the overspeed limit control loop OPC does not go through the form of a simple simple intermediate relay loop and can also achieve very good results.
With the continuous increase of stand-alone capacity, the gap between the steam power and rotor inertia is increasing. Practice shows that it is difficult to satisfy the need for the rotor to fly without tripping because the speed feedback of the control system quickly closes the valve. The request. As a result, an over speed limit control device (OPC) was introduced. At the moment of the oil switch tripping, the regulating valve is immediately closed by electric overspeed. After a certain delay, the regulating door is restored and controlled by the regulating system. Therefore, the load rejection characteristics of the unit is actually the result of the joint action of the control system and the overspeed limit control device. The overspeed limit plays a crucial role in the overspeed protection of the large unit.
Zhuhai Power Plant has two 700 MW units in the first phase. The steam turbine is TC4F-40 type intermediate reheater and three-cylinder four-convection condensing type. The rated power is 700MW and the maximum power is 730MW. The boiler is a radiating and reheating forced circulation boiler, steam flow (BMCR) is 2290t/h, both manufactured by MITSUBISHI Heavy Industry Co., Ltd.; the generator is the Westinghouse company's product, rated power 746MW, MVA capacity 828.889, power factor 0.9, terminal voltage 22kV. The four-stage load rejection test shows that the speed-flying characteristics of the unit after load rejection are good, which is closely related to the design of the OPC loop.
First, speed limit control loop analysis Design of Mitsubishi OPC The OPC circuit designed by Mitsubishi is shown in Figure 1.
Two sets of devices are used in the entire OPC loop. The redundant design is the same, through the AND gate to the OPC solenoid valve to enhance the reliability of the system. The trigger signal of OPC is designed as the synthesis of two signals, one is the frequency difference signal 厶f, it represents the difference Δn between the measured speed n of the turbine and the standard synchronous speed 3000r/min, and it is input into a function generator. The number NUml between 0 and 1 is generated between 0 and 7%, ie between 0 and 210 r/min; the other is the unbalanced quantity signal ΔMW for mechanical and electrical loads. Specifically, the generator current signal I representing the generator power is converted into the percentage of the electric load MWl and the rated load; the ICV valve outlet steam pressure signal Pl representing the mechanical power of the turbine is converted into a percentage of the mechanical load MW2 and the rated load; The user subtracts △MW and enters it into a function generator. When ΔMW<30%, the output signal Num2=0: when 30%<ΔMW<60%, the output signal Num2 is a number between 0 and 1; when ΔMW>60%, the output signal Num2=1 . The power imbalance AMW is designed to compensate for the speed signal. The two signals pass through the compensator and Num=Numl+Num2 is obtained. When Num>1, the OPC operates until the signal of the OPC action disappears.
2. The analysis of Mitsubishi OPC design can be seen from the analysis of Figure 1 and the above. Under different operating conditions, the OPC function suppresses the speed (power) differently. (1) The power compensation when the overspeed turbine is running under no-load conditions Since the loop is always less than 30%, the Num2 output is zero. The OPC only operates when the unit speed exceeds 107% of the rated speed.
(2) Load rejection during 25% load operation Since ΔMW is still less than 30%, the OPC solenoid valve does not operate after the oil switch trips. At this time, the PID valve is closed by adjusting the system's negative feedback. With 25% load rejection, due to the fact that the steam torque does not accelerate the rotor very quickly, the control system has the ability to suppress the speed below 107% of the rated speed. Even if it exceeds 107%, the OPC speed circuit also operates to control the speed in critical condition. Breaker operating speed below.
(3) Load rejection during 50% load operation Since ΔMW is between 30% and 60%, power compensation Num2 between load and load is about 0.66 during load rejection, so when the speed is increased to 3063 r/min, The OPC action quickly closes the regulating valve and suppresses the soaring of the speed.
(4) Load rejection due to 75% and 100% load operation. AMW is greater than 60%. When the load is dumped, the power compensation NUml is immediately set to 1, and the OPC moves to quickly close the regulating valve to suppress the soaring of the speed.
(5) Power imbalance during 60% load operation Even if the oil switch does not trip (speed does not fly up), there is also an imbalance between the generator active power and the turbine mechanical power, power compensation Num2 set 1, OPC solenoid valve action, adjustment Valve fast off.
Second, load rejection test China's load rejection test is divided into 50% and 100% two levels. According to the convention, Mitsubishi's load rejection test is divided into four levels. On the one hand, in order to cooperate with other debugging work, it is necessary for the higher load with the next step. On the other hand, the reliability of the OPC function under different loads can be fully checked. The results of the four-stage load rejection test are shown in Table 1.
From Table 1, it can be seen that when the load is dumped at 175.4 MW, the power balance compensation circuit does not work, and the trigger of the OPC circuit is only generated by the frequency difference signal when the rotation speed exceeds 107%. The regulation system itself can control the flying speed to 107% or less (103.78%), and the adjustment quality of the regulating system is good. The high pressure regulating valve No. 1 starts to close after a delay of 0.198s and the closing time is 1.122s. When load rejection is 350.3MW, the power balance compensation loop is involved. OPC operates after the speed increases by a certain value. No. 1 high pressure control valve starts to close after a delay of 0.180s. The closing time is only 0.280s. When the load is dumped at 532.0MW and 702.8MW, the power balance compensation loop is involved. Under the action of the power balance compensation loop, the OPC immediately moves, and the No. 1 high pressure control valve starts to close with a delay of about 0.1 s. The closing time is only 0.068s. . Although the high-load rejection, the steam torque is several times lower than the low load, the rotor's moment of inertia does not change, but under the control of the OPC loop, the speed can be controlled within the ideal flying value. The 4th-time load-rejection rotor-flying curve has only one highest flying speed, which is stable at around 3000r/min synchronous speed after about 25s, indicating that the unit has good characteristics of preventing the speed-up of the load-rejecting operation and the idling after the decoupling.
Third, overspeed limit control loop analysis of the basic requirements 1. The rapidity of the OPC action proves that the overspeed limit loop OPC has a significant effect in suppressing the dynamic rise of the rotational speed after load rejection. In the design of the unit that requires the valve to have a quick-off function, it is generally required to immediately act after the oil switch trips, and temporarily close the regulating valve. The effect of the ancient system on preventing the first flying speed after load rejection is mainly achieved through OPC. Therefore, the time interval from the moment the oil switch trips to the time the damper is closed to the idle load position determines the first flying value of the rotor. The faster the better, the better. This period of time includes two parts. One is the delay time T of the loop, that is, the time interval from the time the oil switch trips to the adjustment valve starts to close, and the other is to adjust the closing time T of the valve itself:. The closing time of the valve itself is determined by its own time constant. The closing time of modern large-scale units has reached an ideal level; the delay time is generally achieved through a simple intermediate relay circuit, which not only ensures reliability but also shortens the signal transmission time. For example, a 300MW pure electric tune unit adopts the INFI-90 distributed control system produced by Elsag-Bailey of the United States. The original design oil switch trip signal passed through excessive electronic circuit links such as DSI, MFP, DSO, etc., resulting in extended delay, several times. In the load rejection test, the rotation speed exceeded 3300 r/min (over 10%); after removing the microprocessor circuit and replacing it with a hard-wired circuit, the load rejection test was successfully completed. However, there are still some problems. Therefore, before doing the load rejection test, the time from the moment the oil switch trips to the adjustment of the valve closing and to the empty load position should be measured. This is the key to the design of the OPC circuit. This test should be a rejection load. One of the mandatory tests before the test is also a recommended test item after each unit overhaul.
In the condition that there is no oil switch tripping circuit signal action, for the accidental overspeed after the load rejection to prevent the second overshoot and the unit maintains idling, 103% overspeed protection has a significant effect on the continued soaring of control speed. However, in the process of rapid flight of the rotor, the rapidity of the speed of the 103% loop is quite critical. It includes the response of the speed measurement mechanism and the delay of the intermediate circuit. If a power plant 300MW generator demagnetization switch MK trips, and the generator loss of magnetic protection and out of step protection is not moving, the speed is soaring, resulting in 103% speed loop OPC action, although the regulation valve quickly shuts down, but the unit speed is still flying up The critical blocker hits the sub-action and shuts down. Therefore, while checking the rapidity of the tripping circuit of the oil switch, the speed of the 103% loop operation should also be given considerable attention.
For units that are designed to have fast valve closing, when a quick shutoff is required, the adjustment valve should be closed quickly via the OPC circuit.
2. After the OPC reset time OPC action, it is forced to seize control of the unit speed, but the final speed of the stability control should still be completed by the regulation system. For automatic regulated power units with 3000 r/min operation after load rejection, the OPC action can be reset immediately; however, for the adjustment system that has not cut off the given value after load rejection, there is a proper reset time, otherwise the actual speed The difference between the speed and the given speed may lead to a second soaring. Practice shows that the second soaring can not be ignored, and its damage is even more than one soaring. According to some literatures, simulation studies have shown that - the maintenance time is too long and too short are not suitable, and the required time is not less than the closing time of the oil motive. For example, the units in the East Plant generally require a reset time of about 2 ± 0.5s. The second soaring is also closely related to the operation mode of the bypass and the load rejection of the unit. Practice has shown that, for the unit with severe secondary fly-out, the 103% speed loop plays an important role in suppressing the second soaring.
IV. Concluding remarks The results of the four-stage load rejection test show that the OPC circuit design and pure electric control system of the Zhuhai Power Plant 700 MW unit introduce a power compensation circuit, which not only has a fast shutdown function, but also has good adaptability to load rejection conditions under different loads. Although there are many intermediate electronic links in the OPC circuit, the control of the rotational speed has achieved very good results. This shows the performance of various components (including speed, power, pressure measurement, comparison, function generation, compensation, etc.). superior. The design of the overspeed limit control loop OPC does not go through the form of a simple simple intermediate relay loop and can also achieve very good results.
Hydraulic Spare Parts ,Hydraulic Spares,Hydraulic Pump Spare Parts,Hydraulic Replacement Parts
Ningbo Hengnuo Hydraulic Drive Co.,Ltd , https://www.hnhydraulic.com